


SATC – Associação Beneficente da Indústria Carbonífera de Santa Catarina
Desempenho
AeroSATC
Nº 58
Criciúma – SC
Julho de 2017











Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Os melhores documentos à venda: Trabalhos de alunos formados
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Comunidade
Peça ajuda à comunidade e tire suas dúvidas relacionadas ao estudo
Descubra as melhores universidades em seu país de acordo com os usuários da Docsity
Guias grátis
Baixe gratuitamente nossos guias de estudo, métodos para diminuir a ansiedade, dicas de TCC preparadas pelos professores da Docsity
O desenvolvimento de uma bancada de ensaio para validar a escolha da hélice e conhecer o comportamento do motor, seguido por testes dinâmicos em túnel de vento para avaliar a eficiência das hélices e as trações disponíveis em maiores velocidades. Além disso, apresenta cálculos e gráficos sobre a tração disponível, tração requerida, velocidade de planeio, razão de descida, alcance máximo e outros parâmetros relevantes para o desempenho de aeronaves.
Tipologia: Esquemas
1 / 21

Esta página não é visível na pré-visualização
Não perca as partes importantes!
SATC – Associação Beneficente da Indústria Carbonífera de Santa Catarina
Criciúma – SC
Julho de 2017
Com intuito de validar a escolha da hélice e conhecer o comportamento do motor, o desenvolvimento de uma bancada de ensaio foi o ponto de partida do projeto, a qual contou como transdutor de força uma célula de carga que emitia sinais elétricos em tempo real. A leitura e simulação dos dados foram feitos com auxílio dos softwares LabVIEW ® 2016 Student Version e MATLAB ® R2016a.
Figura 1 – Bancada construída para ensaios de tração do motor. Fonte: do Autor (2017).
1.1 Teste Estático
Os testes foram realizados ao nível do mar, ao ar livre e com as hélices disponíveis no inventário. Os processamentos dos dados foram abreviados para a tabela 01.
Tabela 01 – Resultados dos Testes Estáticos Hélices APC [pol] Rotação [RPM] Tração [N]
12.25 x 3.75 11500 43, 12 x 6 10100 37, 13x 4 10650 36, Fonte: do Autor (2017).
Tabela 02 – Condição Climática no Período do Teste Temperatura Máxima [°C]
Temperatura Mínima [°C]
Sensação Térmica [°C]
Pressão [hPA]
Umidade do Ar [%]
Vento [km/h]
21,7 4,8 20,6 1022,3 44 0
Fonte: Estação Meteorológica SATC (2017).
1.2 Teste Dinâmico
Os testes foram realizados com as mesmas hélices em túnel de vento, também ao nível do mar, com propósito de avaliar a eficiência das hélices e as trações disponíveis em maiores velocidades.
Tabela 04 – Teste Dinâmico com Hélice 12x6. Velocidade do Vento [m/s] Tração [N]
0,0 35, 8,0 30, 17,2 23, 9, 0,
Fonte: do Autor (2017).
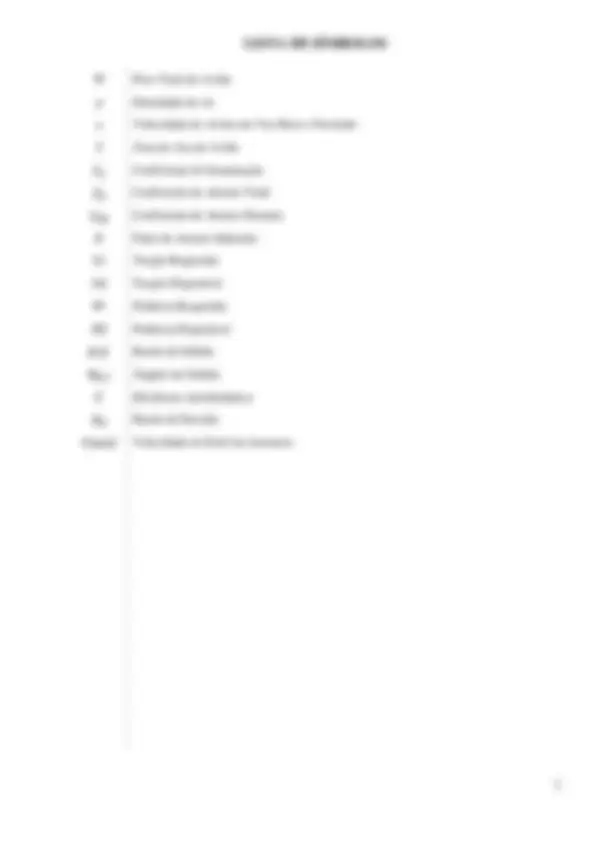
Gráfico 02 – Teste Dinâmico com Hélice 12x6.
Fonte: do Autor (2017).
Tabela 05 – Teste Dinâmico com Hélice 13x4. Velocidade do Vento [m/s] Tração [N]
0,0 38, 8,9 31, 17,0 24, 8, 0,
Fonte: do Autor (2017).
0
5
10
15
20
25
30
35
40
45
183 203 223 243 263 283 303
Tração [N]
Tempo [s]
Vel. Vento Tração
Gráfico 03 – Teste Dinâmico com Hélice 13x4.
Fonte: do Autor (2017).
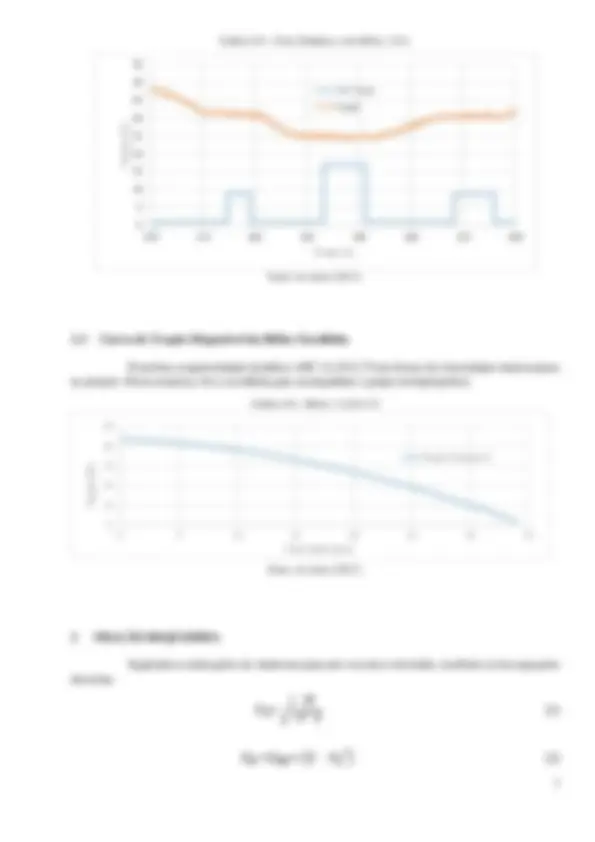
1.3 Curva de Tração Disponível da Hélice Escolhida
É notória a superioridade da hélice APC 12,25x3,75 nas faixas de velocidades interessantes ao projeto. Desta maneira, foi a escolhida para acompanhar o grupo motopropulsor.
Gráfico 04 – Hélice 12,25x3,
Fonte: do Autor (2017).
Seguindo as indicações de Anderson para um voo reto e nivelado, usufruiu-se das equações descritas.
ρ ∙ v^2 ∙ S
0
5
10
15
20
25
30
35
40
45
150 170 190 210 230 250 270 290
Tração [N]
Tempo [s]
Vel. Vento Tração
0
10
20
30
40
50
0 5 10 15 20 25 30 35
Tração [N]
Velocidade [m/s]
Tração Disponível
Pd = Td ∙ v (5)
Gráfico 06 – Potência disponível e requerida para altitude de 1100 m.
Fonte: do Autor. (2017)
Tabela 07 – Resultados sobre Potência Disponível e Requerida. Altitude [m] 0 700 1500
Interseção A [m/s] 8, 09 8,13 8,
Interseção B [m/s] 25,3 25,15 24,
Fonte: do Autor. (2017)
3.1 Razão de Subida
Concordante à Anderson [1], o excesso de potência demonstra a razão de subida do avião.
Pd - Pr W
0
100
200
300
400
500
600
700
800
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Potência [W]
Velocidade [m/s]
Potência Disponível Potência Requerida
C
D
Gráfico 07 – Razão de subida variando as densidades equivalentes as altitudes.
Fonte: do Autor (2017).
A condição de razão de subida máxima (R/Cmáx), para uma altitude de 1100m, é de 1, m/s, com uma velocidade horizontal de 16,3 m/s. Anderson [1] demonstra o ângulo de subida para R/Cmáx na equação 7.
sen (θR/Cmáx ) = (
R/Cmáx vR/Cmáx
O ângulo foi calculado em 5,21°. A tabela 02 apresenta os resultados para as demais altitudes.
Tabela 08 – Resultados sobre o comportamento da aeronave em voo ascendente. Altitude [m] R/Cmáx [m/s] θR/Cmáx [°]
0 1,71 5,
700 1,60 5,
1500 1,48 5,
Fonte: do Autor (2017).
4 CARACTERÍSTICAS DE PLANEIO
Para os seguintes cálculos, admitiu-se um voo com o motor em marcha lenta com intuito de elucidar as características da aeronave durante a descida, seguindo as indicações de Anderson [1].
4.1 Desempenho para Máximo Alcance
O ângulo para máximo alcance (𝛾) da aeronave foi calculado com base na equação 8 descrita por Anderson [1].
tan(γ) =
Emáx
Logo, Miranda [2] descreve os coeficientes de sustentação e arrasto, seguidos da máxima eficiência aerodinâmica nas equações 9, 10 e 11, respectivamente.
0,
0,
0,
1
1,
1,
1,
1,
2
8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Velocidade Vertical [m/s]
Velocidade Horizontal [m/s]
0 m 700 m 1100 m 1500 m
Tabela 10 – Desempenho da aeronave a uma altitude de 700 m. CL^ CD^ E γ [°] vplaneio[m/s]^ vhorizontal [m/s] R/D [m/s] Distância Horizontal Percorrida [m]
0,76 0,07 9,61 5,93° 18,59 18,49 1,95 281,
Fonte: do Autor (2017).
Tabela 11- Desempenho da aeronave a uma altitude de 1500 m. CL^ CD^ E γ [°] vplaneio[m/s]^ vhorizontal [m/s] R/D [m/s] Distância Horizontal Percorrida [m]
0,76 0,07 9,61 5,93° 19,65 19,55 2,03 281,
Fonte: do Autor (2017).
4.2 Desempenho para Máxima Autonomia
A condição de planeio para máxima autonomia segue o mesmo raciocínio da seção anterior, sendo que a única variação no cálculo consiste no coeficiente de sustentação, cujo Raymer [3] expõe.
Tabela 12 – Desempenho da aeronave ao nível do mar. CL^ CD^ E^ γ^ [°]^ vplaneio[m/s]^ vhorizontal [m/s]^ R/D [m/s]^ Distância Horizontal Percorrida^ [m]
1,29 0,15 8,33 6,84 13,86 13,77 1,65 249,
Fonte: do Autor (2017).
Tabela 13 – Desempenho da aeronave a uma altitude de 700 m. CL^ CD^ E γ [°] vplaneio[m/s]^ vhorizontal [m/s] R/D [m/s] Distância Horizontal Percorrida [m]
1,29 0,15 8,33 6,84 14,72 14,62 1,75 249,
Fonte: do Autor (2017).
Tabela 14 – Desempenho da aeronave a uma altitude de 1100 m. CL^ CD^ E γ [°] vplaneio[m/s]^ vhorizontal [m/s] R/D [m/s] Distância Horizontal Percorrida [m]
0,74 0,07 9,61 6,84° 15,01 14,91 1,79 249,
Fonte: do Autor (2017).
Tabela 15 – Desempenho da aeronave a uma altitude de 1500 m. CL^ CD^ E^ γ^ [°]^ vplaneio[m/s]^ vhorizontal [m/s]^ R/D [m/s]^ Distância Horizontal Percorrida^ [m]
0,74 0,07 9,61 5,93° 15,31 15,20 1,82 249,
Fonte: do Autor (2017).
Endossando a segurança do projeto, a altitude de 1500 m foi estipulada como parâmetro de contorno para os seguintes cálculos.
5.1 Sustentação e Arrasto
De acordo com Anderson [1], a velocidade é aproximada para 70% da velocidade de decolagem, assim como a velocidade de decolagem foi considerada como 1,1 ∙ Vestol.
∙ ρ ∙ (0,7 ∙ vdecolagem) ∙ S ∙
𝜋 ∙ 𝑒 0 ∙ AR ∙ μ 2 ∙ φ
∙ ρ ∙ (0,7 ∙ vdecolagem) ∙ S ∙ CD0 + (φ ∙ K ∙ [
π ∙ e 0 ∙ AR ∙ μ 2 ∙ φ
2 ) (17)
5.2 Velocidade de Estol
A velocidade de estol é descrita por Anderson [1] na equação 18.
Vestol=√
ρ ∙ S ∙ CLmax
5.3 Comprimento de Pista para Decolagem
Anderson [1] descreve a equação 19 para a corrida de decolagem.
A aeronave contará com rodas de borracha do material LN 60 Shore A. Portanto, o coeficiente de atrito foi considerado 𝜇 = 0,03 conforme Roskam [5].
Sdecolagem =
g ∙ ρ ∙ CLmáx ∙ [ (^) WT − (^) WD − μ ∙ ( 1 − (^) WL)]vdecolagem
V = V 0 + a ∙ t (21)
∆distância = V 0 ∙ t +
a ∙ t^2 2
Desta maneira, foi calculado uma distância aproximada de 0,43 m a ser somada na distância de decolagem.
Tabela 16 – Distância de decolagem em função das altitudes.
Altitude [m] Distância de Decolagem [m] 0 41, 07 700 42, 1100 54, 1500 59,
Fonte: do Autor (2017). Assim, a aeronave continuaria capacitada a realizar a missão dentro dos parâmetros exigidos pelo regulamento.
O mesmo modelo matemático da seção anterior é adotado para as considerações sobre a aterrisagem.
6.1 Velocidade de Aproximação
Conforme Sadraey [6], a velocidade de aproximação é descrita a partir da equação [23].
vaprox = 1,3 ∙ vestol (23)
Tabela 17 – Velocidades de Aproximação Variando a Altitude. Altitude [m] (^) 𝑣𝑎𝑝𝑟𝑜𝑥 [m/s] 0 14, 700 15, 1100 15, 1500 16,
Fonte: do Autor (2017).
6.2 Sustentação e Arrasto
As forças são descritas por Anderson [1].
Laprox =
∙ ρ ∙ (0,7 ∙ vaprox) ∙ S ∙
𝜋 ∙ 𝑒 0 ∙ AR ∙ μ 2 ∙ φ
Daprox =
∙ ρ ∙ (0,7 ∙ vaprox) ∙ S ∙ CD0 + (φ ∙ K ∙ [
π ∙ e 0 ∙ AR ∙ μ 2 ∙ φ
2 ) (25)
6.3 Comprimento de Pista para Pouso
Anderson [1] expõe a equação 26 para a distância de aterrisagem.
6.4 Resultados
Tabela 18 – Comparação de aterrisagens variando as velocidades. Altitude [m] Distância de Pouso com vaprox [m] Distância de Pouso com vestol [m] 0 262,16 177, 700 280,52 190, 1100 238,66 171, 1500 244,02 176,
Fonte: do Autor (2017).
Nestas circunstâncias, a aeronave não atenderá o limite estipulado pelo regulamento da competição em quaisquer dos cenários calculados.
A velocidade de curvatura mínimo e seu raio são calculados a partir das equações 27 e 28, respectivamente, assim como o fator de carga (29) e o ângulo para completar o raio (30), descritas por Miranda [1].
Spouso =
g ∙ ρ ∙ CLmáx ∙ [ (^) WT - (^) WD + μ ∙ ( 1 - (^) WL) ] 0,7𝑣𝑎𝑝𝑟𝑜𝑥
VRmín=√
4 ∙ K ∙ (W S )
ρ ∙ ( (^) WT)
(27)
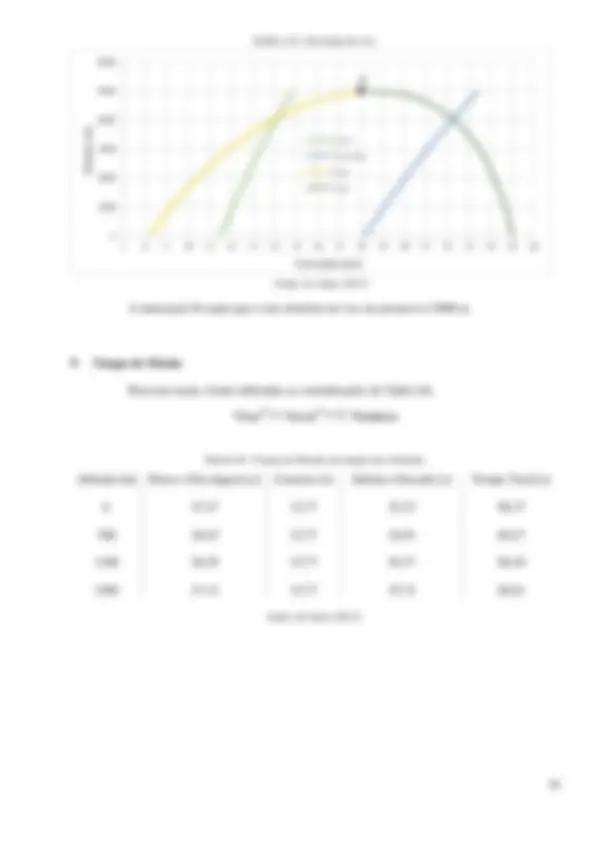
Gráfico 10 – Envelope de voo.
Fonte: do Autor (2017)
A interseção H expõe que o teto absoluto de voo da aeronave é 5000 m.
9 Tempo de Missão
Para esta seção, foram utilizadas as considerações de Tipler [4].
𝑣𝑓𝑖𝑛𝑎𝑙^2 = 𝑣𝑖𝑛𝑖𝑐𝑖𝑎𝑙^2 + 2 ∙ ∆𝑑𝑖𝑠𝑡â𝑛𝑐𝑖𝑎
Tabela 20 – Tempo de Missão em função das Altitudes. Altitude [m] Pouso e Decolagem [s] Cruzeiro [s] Subida e Descida [s] Tempo Total [s]
0
700
Fonte: do Autor (2017).
0
1000
2000
3000
4000
5000
6000
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
Altitude [m]
Velocidade [m/s]
Vestol Vmanobra Vmín Vmáx
H