


Phasor Measurement Unit Data
in Power System State Estimation
Intermediate Project Report
Power Systems Engineering Research Center
A National Science Foundation
Industry/University Cooperative Research Center
since 1996
PSERC




































































Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Los mejores documentos en venta realizados por estudiantes que han terminado sus estudios
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Descubre las mejores universidades de tu país según los usuarios de Docsity
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Sincrofasores, estudio de su surgimiento e implementacion
Tipo: Esquemas y mapas conceptuales
1 / 78

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Power Systems Engineering Research Center
A National Science Foundation Industry/University Cooperative Research Center since 1996
The Power Systems Engineering Research Center sponsored the research project titled “Enhanced State Estimators.” The project began 2004 and is expected to be completed in
We express our appreciation for the support provided by PSERC’s industrial members and by the National Science Foundation under grant NSF EEC-0001880 received under the Industry / University Cooperative Research Center program.
The authors thank all PSERC members for their technical advice on the project, especially Dale Krummen (AEP), Jay Giri (AREVA T&D), Jerome Ryckbosch (RTE), and Ram Adapa (EPRI) who are industry advisors for the project. The authors also acknowledge Drs. Ali Abur and A. P. Sakis Meliopoulos of Texas A&M University and Georgia Tech respectively who contributed technical advice and data to this work. Dr. Abur is the project leader.
i
This report deals with the placement of phasor measurement units (PMUs) based on the improvement in error in the estimate of the voltage phase angles in power systems. The present technology measures voltage, current, and real and reactive power for determining the operating condition of the electric network. This technology cannot measure voltage phase angle directly. Thus, voltage phase angles must be found by state estimation.
This research examined two possible methods for incorporating phasor measurement units into present state estimation methods. The two principal state estimation methods considered are: 1) using weighted least squares with significant weight on the PMU measurements; and 2) eliminating the equations associated with the voltage phase angle measurements made by the PMU. The PMU measurements would be done using global positioning system (GPS) technology to measure voltage phase angles; this measurement would be very accurate.
The test bed for the state estimation methodology assessment is the Institute Electrical and Electronics Engineering (IEEE) 14 bus system. In this study, the IEEE 14 bus system is fully observable by supervisory control and data acquisition (SCADA) devices. The incorporation of PMU measurements into the system increases the accuracy of the voltage phase angle estimates. The cases considered examine the location of the PMUs based on decreasing the error in the estimate of voltage phase angle. The work includes an examination of the impact of noise on the location of the PMUs. Also included in this work is the relationship between the number of PMUs installed and the error in the voltage phase angle estimates. A goal of this work is to show the gains that can be attained by PMUs.
ii
1.1 Background and Motivation
The electric power industry is undergoing multiple changes and restructuring towards deregulation. As the restructuring is happening profits are less guaranteed, and some electric power utilities are increasing the loads on the grid to generate more revenue. The increased power exchange has a concomitant requirement for situational awareness. This refers to the need for system operators to know the operating states of the system.
The Northeast blackout of 2003 was in part caused by the national electric grid being pushed past is limits and the operators not detecting that the grid was in a critical state [1]. If the operators of the electric grid in Ohio had been able to detect that several areas the grid were in critical states, they might have been able to prevent the cascading events which followed. One key element of modern energy management systems is a state estimator: a state estimator uses system inputs and a system model to obtain and depict the power system states (mainly bus voltage magnitudes and phase angles).
Most utilities have state estimators in the package of energy management systems. Due to the fact that state estimators tend to not accurately represent the system during times of use of incorrect measurements (a condition which is flagged by the estimator), the system operators might turn off this function, have low confidence in the displayed values, or ignore displays. There are several topics in state estimation being studied to improve the accuracy of the state estimation in power systems. In this report the author examines how new technology of a phasor measurement units, a global positioning system (GPS) technology can be used to help better the estimation of the states in an electrical power systems.
1.2 State Estimation Literature Review
Schweppe was one of the first to formulate static state estimation for a power network based on the power flow model [2]. The idea is to estimate the states of the power network. These states might not be directly observable based on physical relationships between the measurements and the desired unknown states. The model developed by Schweppe requires that the physical state of the system is known, e.g. breaker status [2].
Another advancement in the field of state estimation was the introduction of a weight matrix to increase the accuracy of the results. Weighting is done to enhance the “input” of accurate measurements, and de-emphasize the less accurate measurements. It can be shown that the maximum likelihood estimate utilizes weights that are based on the covariance of the measurement devices. The more accurate a measurement, the more weight in the state estimator [3]. Weighting is the practice of accounting for the confidence in a measurement. The process of overcoming measurement noise is inherent in taking physical measurements, but there are situations in which the data are grossly erroneous. The data that are erroneous must be identified and eliminated. One method for the detection of bad data is the examination of the measurements and if the measurements deviate from expected values by some preset threshold the measurement
can be assumed to be bad [4]. Another problem that causes state estimators inaccuracies is the model itself. Generally the simple linear model Hx=z is used where the H is the measurement model (processing matrix), x is the state vector, and x is the measurements. If the process matrix is incorrect, the model does not represent what is physically happening in the system. The detection of both erroneous data or improper formation of the process matrix may be done by examining the residual of the equation Hx=z [3]. The common technique in correcting the issue of unobservable areas is to provide an estimate of what the readings are in the unobservable areas to create an entire system model [5].
References [6, 7, 8, 9] are textbooks on state estimation in power engineering; references [10 -- 14] are representative of solutions methods; and [4, 15] are case studies.
1.3 The Pseudoinverse and Its Relationship to Least-Squares Estimation
The commonly used model for a linear system is
Hx=z (1.1)
with H as the process matrix ( m by s matrix), x is the state vector (dimension s ), and z is the measurement vector (dimension m ) is overdetermined when m is larger than s. References [6 – 9, 16] describe Equation (1.1). Equation (1.1) can be “solved” in the least-square sense by minimizing ||r|| 2 ,
r=Hx-z (1.2)
where || ● || 2 refers to the 2-norm [8]. Properties of norms appear in [8]. It can be shown that || r || 2 is minimized when
x = x ˆ= H + z. (1.3)
The notation is the “estimate” of vector x, H+^ pseudoinverse of H. References [6 – 9, 16] describe the properties of the pseudoinverse. Equation (1.3) is known as an unbiased least squares estimator.
x ˆ
1.4 Phasor Measurement Units Literature Review
Phasor measurement units (PMUs) are instruments that take measurements of voltages and currents and time-stamp these measurements with high precision. PMUs are equipped with Global Positioning Systems (GPS) receivers. The GPS receivers allow for the synchronization of the several readings taken at distant points [17]. PMUs were developed from the invention of the symmetrical component distance relay (SCDR). The SCDR development outcome was a recursive algorithm for calculating symmetrical components of voltage and current [18]. Synchronization is made possible with the advent of the GPS satellite system. The GPS system [19] is a system of 36 satellites (of which 24 are used at one time) to produce time signals at the earth’s surface. GPS receivers can resolve these signals into { x,y,z,t } coordinates. The t coordinate is time. This is accomplished by solving the distance=(rate)(time) in three dimensions using satellite signals. The PMU records the sequence currents and voltages and time stamps
conclusions about the method studied in this report and future work to make the method more refined and applicable for real world systems.
Three appendices are attached to the report:
A. A description of a 14 bus test bed system B. MATLAB scripts used in this work C. A listing of all experiments done and the conditions of these experiments.
2.1 The Method of Least Squares
Present state estimation techniques rely on the least squares approach to finding the best estimation of states. The method of least squares uses the linear equation,
Hx = z (2.1)
H is the process matrix dimensioned ( m x s ), x is the state vector dimensioned ( s ), and z is the measurement vector dimensioned ( m ). In state estimation it assumed that the system is over determined, meaning there are more measurements than states. However rarely are the measurements perfect, and therefore z is actually a perfect measurement plus ‘noise.’ The problem becomes how to find the best fit between measurements z and states x. In the least squares approach idea is minimize the difference L 2 norm of the residual,
r = z − Hx (2.2)
To minimize Equation 2.3, take the derivative, which results in Equation 2.4. Then simple algebra is used to separate the best estimate of x , namely x ˆ,
HHx H z x
r (^) t t xx
=
ˆ
2 (^2) (2.4)
H t^ Hx ˆ = Ht z x ˆ = ( HtH ) Htz
− 1
. (2.5)
The formulation in (2.5) is valid only when Ht^ H is nonsingular. The singular case is rarely encountered but can be handled by an alternative formatting. There are two notable terms in Equation (2.5): (Ht^ H)-1^ Ht^ term to this equation the pseudoinverse (2.7) and the gain matrix (2.6),
G = Ht H (2.6)
H +^ = ( Ht^ H ) Ht − 1
. (2.7)
The notation H+^ refers to the pseudoinverse.
2.2 Weighted Least Squares
A drawback of the least squares approximation is that the all the measurements are treated with the same weight. This procedure is unbiased. This implies that all the
21 22
11 12 h h
h h H tWH^
′ 2 a^ + b^2 a + b^2 c +^ a
′ ′ a^ + b a + b c +^ a
′ 2 a^ + b^2 a + b^2 c +^ a
h (^) 11 = h 11 w 110 + h 21 w 210 + h 31 w 310
h 12 = h 21 = h 11 h 12 w 110 + h 21 h 22 w 210 + h 31 h 32 w 310
h (^) 22 = h 12 w 110 + h 22 w 210 + h 32 w 310_._
If c is much larger than b and a , any term raised to the c power is much larger than the rest. This causes the matrix Ht^ WH to approach being singular. Depending on precision of the software package being used and the magnitude of the difference between c and a and b can cause the terms not raised to the c power to be dropped completely.
2.3 Norms
The state estimation technique presented relies on the L 2 being a satisfactory in representing the error between the measurements and the states. The Lp norm is,
m
i
p r (^) p ∑ xi =
0
There are several L norms however three most commonly discussed are the L 1 , L 2 , and the L∞ norm. The L 1 norm is the sum of the absolute of the number as seen in Equation 2.14. The L 2 norm is the square root of the sum of the squares, and the L∞ norm is the largest single value in the vector,
m
i
r xi 1
m
i
r xi 1
2 || || 2 (2.15)
1
i
m
i
∞ ∞ ∑^.^ (2.16)
A plot can be created of the different norms of a vector of dimension two,
x =( x 1 , x 2 )t^ (2.17)
|| x || p p = kp. (2.18)
Figure 2.1 shows loci of ||x||p =k. L norms are a way of collapsing data stored in a vector into a single value.
||x||∞=k
Figure 2.1 Graphical representations of L-norms
2.4 Condition Numbers
State Estimation based on the Hx=z has a weakness that small perturbations in vector z or matrix H can cause large changes in the estimated state vector,. The condition number of a matrix is the largest singular value divided by the smallest singular value. The singular value matrix is a diagonal matrix determined by,
x ˆ
A ∈ ℜ m ×^ n U ∈ ℜ m × m V ∈ℜ n × n
U TAV = diag^ (σ^1 , σ 2 ,..., σ p ) p = min{ m^ , n } (2.25)
2
1
The condition number quantifies how close the matrix is to being orthogonal or singular. An orthogonal matrix has a condition number of 1 and singular matrix has a condition number of infinity. As the condition number approaches 1, or is small, the matrix is considered well conditioned. The counter statement is that as the condition number of a matrix is large, then the matrix is considered ill-conditioned or close to being a singular matrix. Though not a linear map the larger the condition number of a matrix the larger the amplification of a perturbations in either the z vector or H matrix will map to the estimated state vector, x ˆ.
zgps
z z
and
− 2
2 1 0
GPS
where
σ 1 −^2 << σ GPS^ −^2_._
The estimate of (^) ⎥becomes ⎦
= ( H ′ tW^ H ′ ′) H ′ tWz ′′
In (3.4), the vector and matrices have dimension as follows,
H’ (m+g) by s
W’ (m+g) by (m+g)
z' (m+g) by 1
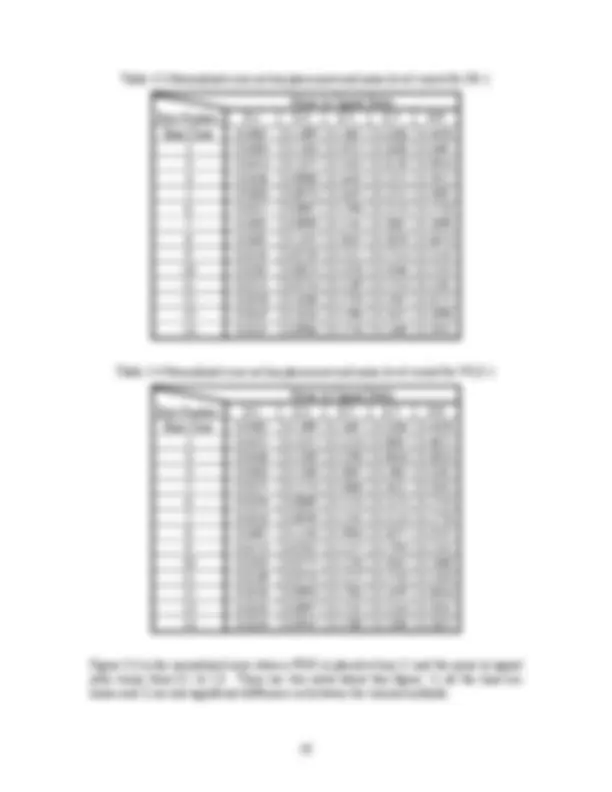
where s is the total number of states to be estimated (including the δGPS states); m is the dimension of measurements excluding the PMU measurements; g is the number of PMU phase angle measurements. Note that in the over determined case m+g > s. Experiments using the augmented weighted least squares method will be denoted by WLS.
A variation on this method of the state estimation is to replace the estimated values for the voltage phase angles associated with PMU measurements with the measurements made by the PMU, after the state estimation is completed. This will generally decrease the amount of error in the answer. WLSp denotes experiments using this method of replacing the voltage phase angle measurements after the estimation.
3.4 Solution by Direct Substitution
An alternative approach offered in this report is concept of direct substitution. The approach denominated “direct substitution” is offered as an alternative to the direct implementation of weighted least squares estimation described in section 3.3. DS denotes experiments using direct substitution. Again starting with Equation (3.1), multiplying out the right hand side of the equation yields
Substitute the PMU measurements for the voltage phase angles,
The state estimation equation for direct substitutions is
In (3.5), the vectors and matrices have dimensions as follows
H 1 +^ (s -- g) by m z m by 1
η m by 1 H 2 m by g
z (^) GPS g by 1.
3.5 Metrics for Comparing WLS to Direct Substitution
The residual vector is typically used to determine the fit of the measurements to the model in power system state estimation. The residual is used because when state estimation is being conducted for an actual system, the ‘true’ values of the states are not known. The residual vector as discussed earlier is r = z − Hx ˆ. It is convenient to use the 2-norm of the r as an index of the agreement of the measurement equations,
2 r (^) 2 rr = t
r = z − H x ˆ