

MODERN ROBOTICS
MECHANICS, PLANNING, AND CONTROL
Exercise Solutions
September 9, 2017


























































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
Modern Robotics Mechanics, Planning, and Control (Kevin M. Lynch, Frank C. Park) Exercise Solutions
Typology: Cheat Sheet
1 / 156

This page cannot be seen from the preview
Don't miss anything!
2
4
Exercise 2.1. The first point placed has n degrees of freedom, the next one has one constraint so n − 1 degrees of freedom, the next has two constraints, etc. So n + (n − 1) + (n − 2) +... 1 = n(n + 1)/2. (Get this by summing the outermost pair in the sequence, n + 1 = n + 1, then the pair (n − 1) + 2 = n + 1, etc., and observe that there are n/2 such pairs.) n of these freedoms are the linear freedoms of placing the first point; the other n(n − 1)/2 are rotational freedoms. After choosing the first point, the next point is on the sphere Sn−^1 , the next is on Sn−^2 , etc., so the topology of the space is Rn^ × Sn−^1 × Sn−^2 ×... × S^1.
Exercise 2.2. (a) The shoulder is a spherical joint (four dof), the elbow has one dof, the wrist has two dof, and between the elbow and the wrist there is one more dof (rotation of the forearm about the axis of the forearm). Therefore the arm has seven dof. (b) Placing the palm at a fixed position and orientation in space puts six constraints on the arm (the six dof of a rigid body). Keeping the center of the shoulder joint stationary, there is only one dof left: the arc of a circle on which the tip of the elbow can lie. This is one dof, so the arm must have started with seven dof before six constraints were placed on it.
Exercise 2.3. Treat the shoulder as a spherical joint (three dof) between the torso and the upper arm bone (humerus), and assume the carpal bones just beyond the wrist joint form a rigid body. Then the closed-chain linkage of the forearm between the humerus and the carpal bones, which includes only the radius and the ulna as links, must have four dof, since our solution in the previous exercise tells us that the arm has seven dof. We know that each of the radius and the ulna must have at least one joint at the proximal (closer to the torso) and distal (closer to the hand) ends of forearm, so there are at least four joints between the humerus and carpal bones. There could be as many as six: three at the elbow (humeroradial, humeroulnar, and proximal radioulnar) and three at the wrist (radiocarpal, ulnocarpal, and distal radioulnar). Without knowing more about the anatomy of the arm, we cannot say for sure. If we assume the maximum number of joints, six, in the forearm closed chain, then the arm has J = 7 joints (the three-dof S joint at the shoulder and the six forearm joints mentioned above) and N = 5 links (the torso “ground,” the humerus, the ulna, the radius, and the carpal bones). By Gr¨ubler’s formula,
i=
fi = −18 + freedoms of the six forearm joints.
Therefore the six forearm joints must have a total of 25 freedoms. These joints, averaging more than four freedoms each, are not standard joints we have studied. They are stabilized by a complex of ligaments joining the bones. If we assume the minimum number of joints, four, in the forearm closed chain, then the arm has J = 5 joints and N = 5 links. By Gr¨ubler’s formula,
i=
fi = −6 + 3 + freedoms of the four forearm joints.
Therefore there must be a total of 10 freedoms at the four forearm joints. These could potentially be joints we have studied, such as two universal joints at the elbow (four dof) and two spherical joints at the wrist (six dof). The problem is to show correct general reasoning, not to demonstrate a detailed understanding of arm anatomy!
Exercise 2.4. Once the hands firmly grip the steering wheel, each arm has n − 6 dof if the wheel is stationary. The mobility
(b) Consider open chain arms as 7-dof joint connecting object and ground. Then,
N = 1 (object) + 1 (ground) = 2 J = n (open chain arm) ∑ fi = n × 7 = 7n.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = (n + 6).
(c) Each of the n 7-dof open chains is replaced by the 6-dof open chains. So,
N = 1 (object) + 1 (ground) = 2 J = n (open chain arm) ∑ fi = n × 6 = 6n.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6.
Exercise 2.8. Set the degrees of freedom of each open chain leg to α. Then
N = 1 (object) + 1 (ground) = 2 J = n (open chain arms) ∑ fi = n × α = αn.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6 + (α − 6)n = 6.
Therefore, the total degrees of freedom is six regardless of the number of open chain legs.
Exercise 2.9. (a) Consider the combination of revolute (R) and prismatic (P) joint as a 2-dof cylindrical (C) joint. Then
N = 7 (links) + 1 (ground) = 8 J = 7 (R joints) + 1 (P joints) + 2 (C joints) = 10 ∑ fi = 7 × 1 + 1 × 1 + 2 × 2 = 12.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 3.
(b) Considering all the R and P joints separately,
N = 13 (links) + 1 (ground) = 14 J = 16 (R joints) + 2 (P joints) = 18 ∑ fi = 16 × 1 + 2 × 1 = 18.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 3.
(c) A fork joint is kinematically equivalent to a C joint, so that
N = 7 (links) + 1 (ground) = 8 J = 6 (R joints) + 2 (P joints) + 1 (C joint) = 9 ∑ fi = 6 × 1 + 2 × 1 + 1 × 2 = 10.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 4.
(d)
N = 5 (links) + 1 (ground) = 6 J = 6 (R joints) + 1 (P joints) = 7 ∑ fi = 6 × 1 + 1 × 1 = 7.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 1.
(e)
N = 13 (links) + 1 (ground) = 14 J = 14 (R joints) + 4 (P joints) = 18 ∑ fi = 14 × 1 + 4 × 1 = 18.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 3.
(f)
N = 6 (links) + 1 (ground) = 7 J = 8 (R joints) + 1 (P joints) = 9 ∑ fi = 8 × 1 + 1 × 1 = 9.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 0.
Exercise 2.10. (a)
N = 5 (links) + 1 (ground) = 6 J = 7 (R joints) ∑ fi = 7 × 1 = 7.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 1.
(c)
N = 5 (rods) + 1 (plate) + 1 (ground) = 7 J = 2 (P joints) + 3 (U joints) + 3 (S joints) = 8 ∑ fi = 2 × 1 + 3 × 2 + 3 × 3 = 17.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 5.
(d)
N = 7 (links) + 1 (ground) = 8 J = 3 (P joints) + 6 (U joints) = 9 ∑ fi = 3 × 1 + 6 × 2 = 15.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 3.
(e)
N = 7 (links) + 1 (ground) = 8 J = 2 (R joints) + 4 (U joints) + 2 (P joints) = 8 ∑ fi = 2 × 1 + 4 × 2 + 2 × 1 = 12.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6.
(f)
N = 3 (rods) + 1 (plate) + 1 (ground) = 5 J = 3 (3 dof joints) + 3 (S joints) = 6 ∑ fi = 3 × 3 + 3 × 3 = 18.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6.
Exercise 2.12. (a)
N = 7 (links) + 1 (ground=legs) = 8 J = 3 (R joints) + 6 (U joints) = 9 ∑ fi = 3 × 1 + 6 × 2 = 15.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 3.
(b)
N = 8 (links) + 1 (ground) = 9 J = 4 (R joints) + 5 (P joints) = 9 ∑ fi = 4 × 1 + 5 × 1 = 9.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 3.
(c)
N = 12 (links) + 1 (plate) + 1 (ground) = 14 J = 6 (R joints) + 6 (U joints) + 6 (S joints) = 18 ∑ fi = 6 × 1 + 6 × 2 + 6 × 3 = 36.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6.
(d) The spatial parallel mechanism consists of four RFRRPR serial subchains, where F is a four-bar parallelogram linkage. Each serial subchain with RFRRPR joints can be regarded as ground with a single 6-dof joint:
dof = 1 (four-bar parallelogram linkage) + 1 × 4 (R joints) + 1 (P joint) = 6.
Now apply Gr¨ubler’s formula to the 4−RFRRPR mechanism:
N = 1 (plate) + 1 (ground) = 2 J = 4 (RFRRPR joints) ∑ fi = 4 × 6 = 24.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6.
Exercise 2.13.
N = 6 (legs) + 1 (upper platform) + 1 (ground) = 8 J = 12 (S joints) ∑ fi = 12 × 3 = 36.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 6.
The upper platform can simultaneously translate and rotate about the vertical axis, and also translate horizontally.
Exercise 2.14.
robot links robot joints reference frame work space
Figure 2.
Exercise 2.17. (a) The surgical tool can move freely in the base hole, so there’s no joint constraint between the end-effector and the base. In this case,
N = 3 (3 links for leg A) + 8 (4 links for each leg B and C) + 2 (end-effector and base) = 13 J = 4 (3 R and 1 P joints for leg A) + 10 (4 R and 1 U joints for each leg B and C) = 14 ∑ fi = 4 (leg A) + 2 × 6 (leg B and C) = 16.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 4.
(b) The constraint that the surgical tool must pass through point A is equivalent to connecting the tool with a four-dof spherical-prismatic pair: the spherical joint determines the tool orientation, while the prismatic joint determines the displacement along the tool axial direction. Therefore
N = 3 + 8 + 2 (end-effector and base) = 13 J = 4 + 10 + 1 (SP joint between end-effector and base) = 15 ∑ fi = 4 + 2 × 6 + 4 = 20.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 2.
(c) Since the axes of all the revolute joints pass through point A, all the links are constrained to move on the two-dimensional sphere and the tool always passes through point A (Refer to exercise 2.16). In this case, the two-dimensional version of Gr¨ubler’s formula must be used:
N = 9 (3 links for each leg) + 2 (end-effector and base) = 11 J = 12 (4 R joints for each leg) ∑ fi = 3 × 4 = 12.
Substituting the above values into the planar version of Gr¨ubler’s formula,
dof = 3(N − 1 − J) +
fi = 6.
Exercise 2.18.
N = 6 (links) + 1 (moving platform) + 1 (ground) = 8 J = 6 (P joints) + 3 (U joints) = 9 ∑ fi = 6 × 1 + 3 × 2 = 12.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 0.
However, this mechanism can move: if the three P joints on the fixed base move identically, the moving platform will move vertically. Therefore, it contradicts the fact that the mechanism has zero degrees of freedom as calculated by Gr¨ubler’s formula.
Exercise 2.19. There are N = 7 links (ground, torso, two upper arms, two lower arms, and one combined hand-object-hand link) and J = 8 joints (three R, four S, and a joint between the box and the table that has three sliding freedoms, two translational and one rotational). By Gr¨ubler’s formula,
dof = 6(7 − 1 − 8) +
i=
fi = −12 + 3(1) + 4(3) + 3 = 6.
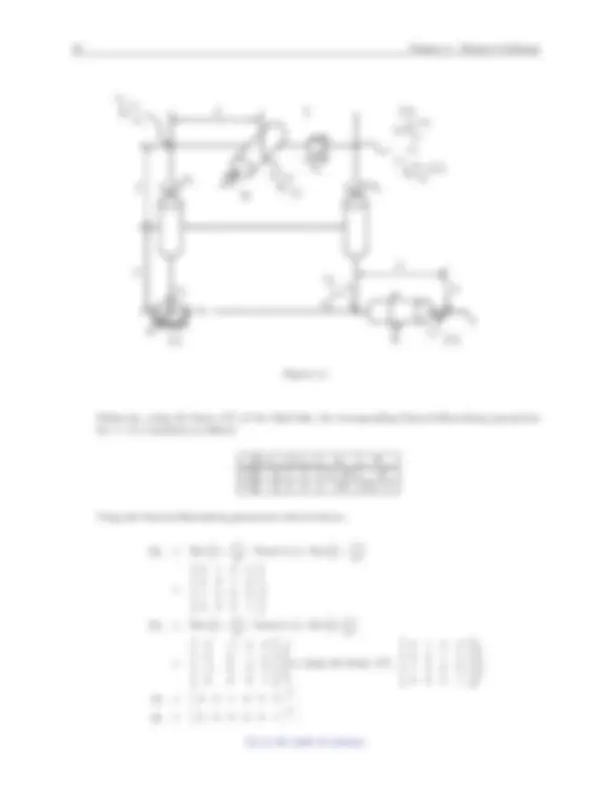
Exercise 2.20. (a) Referring to the Figure 2.2, when the body is fixed (ground) there are four rigid wings, four rigid legs, four linkages consisting of two links each, and the body (ground), so N = 17. There are four wing R joints, four leg R joints, four leg S joints, four leg P joints, and four leg U joints, so J = 20. The freedoms of the joints are 1 for the R and P joints, two for the U, three for the U, so
i fi^ = 12(1) + 4(2) + 4(3) = 32. Gr¨ubler’s formula gives 6(17 − 1 − 20) + 32 = 8 dof. (b) Add six dof for the chassis to get 14 dof. (c) Keeping a foot at a fixed location adds 3 constraints on that foot, or 12 constraints total, so subtract 12 from 14 (the answer to part (b)) to get 2 dof. Alternatively, by Gr¨ubler, add four more S joints at the feet (with 3 dof each) and one more link (ground) compared to the answer in part (a). So 6(18 − 1 − 24) + (32 + 4(3)) = 2 dof. Note that the wings, of course, can still move with 4 dof, so that means the legs and body only (ignoring the wings) have −2 dof, assuming that none of the constraints are redundant. This means (1) the body and legs cannot move and (2) we even have two constraints on where we can position the legs on the ground.
Exercise 2.22. (a) The palm has six dof and each of the four fingers has four dof, so the hand has 22 dof total. When one finger is in contact with the table, there is one constraint on its position (the equation describing the height of the finger above the table being equal to zero), so the hand has 21 dof. If n fingers are in contact, the hand has 22 − n dof. (b) 26 − n dof. (c) Model the finger contacts as spherical joints, so N = 14 (12 finger links, the ellipsoid and the palm ground) and J = 16, which includes four U joints, eight R joints, and four S joints (at the finger contacts). By Gr¨ubler, dof = 6(14 − 1 − 16) + 4(2) + 8(1) + 4(3) = 10. (d) This question is to see how the student thinks about rolling constraints. A sphere rolling on a surface can achieve any configuration in contact with the surface; the rolling, no-slip nonholonomic velocity constraints do not create any configuration constraint other than that the sphere must remain in contact with the surface. Therefore each finger contact “joint” has five degrees of freedom. Building on (c) above, dof = −18 + 4(2) + 8(1) + 4(5) = 28.
Exercise 2.23. Define the joint variables as shown in Figure 2.3 and let the length of the links be L. The positions of the
(x , y)
(x , y)
(x , y) ^
Figure 2.
centers of each link are denoted (x 3 , y 3 ),(x 2 , y 2 ), (x 1 , y 1 ), respectively (starting from the left in Figure 2.3). Define the eight-dimensional vector x = (θ 1 , θ 2 , x 1 , y 1 , x 2 , y 2 , x 3 , y 3 ). The constraint equations gi(x) = 0 of the joints are derived as follows:
g 1 (x) = x 1 − L cos θ 1 + L cos θ 2 g 2 (x) = y 1 − L sin θ 1 − L sin θ 2 g 3 (x) = x 2 − L cos θ 1 + L/2 cos θ 2 g 4 (x) = y 2 − L sin θ 1 − L/2 sin θ 2 g 5 (x) = x 3 − L/2 cos θ 1 g 6 (x) = y 3 − L/2 sin θ 1
Additionally, there is one more constraint on the slider g 7 (x) = y 1 = 0. Therefore, there are 7 constraint equations and 8 configuration variables in total. The feasible configuration space of the joint variables can now be determined as
C = {x = (θ 1 , θ 2 , x 1 , y 1 , x 2 , y 2 , x 3 , y 3 ) |gi(x) = 0 (i = 1, · · · , 7)}.
The configuration space C projected to the space of joint variables (θ 1 , θ 2 , x 1 ) is given by
Cp = {(θ 1 , θ 2 , x 1 ) |θ 1 = θ 2 , x 1 = L(cos θ 1 + cos θ 2 )}.
Exercise 2.24. (a) The four-bar linkage is floating in space, so the number of links is 4 since the ground and linkage are not connected. 4 joints connect the adjacent links of the floating linkage. Finally, m in Gr¨ubler’s formula is set to 6 since it is a spatial mechanism. We therefore have
N = 4 (4 links) + 1 (ground) = 5 J = 4 (R joints between links) ∑ fi = 4.
Substituting the above values into the spatial version of Gr¨ubler’s formula,
dof = 6(N − 1 − J) +
fi = 4.
However, the actual dof of the floating system differs from that predicted by Gr¨ubler’s formula: any single floating system has at least 6 dof. This mismatch will be discussed further in (b). (b) The degrees of freedom can be calculated by subtracting the number of constraints from the number of variables. First of all, we already know that there are three coordinates for each point and three points on each link. Thus, the total number of variables is 36. The planar four-bar linkage has three types of constraints: rigid body, revolute joint, and planar motion. For rigid body constraints, twelve constraints should be considered. For link 1,
‖pA − pB ‖ = const. ⇔
(xA − xB )^2 + (yA − yB )^2 + (zA − zB )^2 = const. ‖pB − pC ‖ = const. ⇔
(xB − xC )^2 + (yB − yC )^2 + (zB − zC )^2 = const. ‖pC − pA‖ = const. ⇔
(xC − xA)^2 + (yC − yA)^2 + (zC − zA)^2 = const.
Similarly, constraints on links 2, 3, and 4 can be expressed as above. The four pairs of points are connected by a revolute joint: C with D, F with G, I with J, and L with A. These constraints can be written as follows:
pC = pD ⇔ (xC , yC , zC ) = (xD , yD , zD ) ⇔ xC = xD , yC = yD , zC = zD pF = pG ⇔ (xF , yF , zF ) = (xG, yG, zG) ⇔ xF = xG, yF = yG, zF = zG pI = pJ ⇔ (xI , yI , zI ) = (xJ , yJ , zJ ) ⇔ xI = xJ , yI = yJ , zI = zJ pL = pA ⇔ (xL, yL, zL) = (xA, yA, zA) ⇔ xL = xA, yL = yA, zL = zA.
Finally, only planar motions are admissible: all of the points on the linkage lie on a plane with normal vector ~n =
− AC→×− AJ→ ‖− AC→·− AJ→‖ , and −→ AF · ~n = 0 −−→ AB · ~n = 0 −→ AE · ~n = 0 −−→ AH · ~n = 0 −−→ AK · ~n = 0
The first constraint
AF · ~n = 0 is to prevent folding between planes DF I and ACJ. The total number of constraints is 29. Therefore, the degrees of freedom of the system is equal to 36 − 29 = 7 dof. The reason why this differs from the result obtained from Gr¨ubler’s formula is that the planar four-bar linkage floating in 3-D space undergoes 2-D motion. The spatial version of Gr¨ubler’s formula should not be applied to planar motion in 3D space.
Exercise 2.25.
Therefore, φ represents the angle between CD and AD (see Figure 2.4). The relation between φ, ψ and η can be obtained from
cos(ψ − φ) =
γ √ α^2 + β^2
− 2 bc cos η √ 4 b^2 c^2
= − cos η
ψ − φ = ±η
∴ ψ = φ ± η.
The two possible values of the output angle ψ represent the elbow-up and elbow-down configurations with respect to AD (Figure 2.6).
Elbow-up
Elbow-down
η η
φ
Figure 2.
(c) By substituting the expressions for a, b, g, h into the equations for α, β, γ, the relation between θ and ψ can be derived as shown in Figure 2.7 (obtained via MATLAB).
0 1 2 3 4 5 6 7 theta (rad)
0
1
2
3
4
5
6
7
psi (rad)
elbow-up elbow-down
Figure 2.
(d) Same as 2.25(c) (Figure 2.8).
0 1 2 3 4 5 6 7 theta (rad)
1
2
3
4
5
psi (rad)
elbow-up elbow-down
Figure 2.
(e) Same as 2.25(c) (Figure 2.9).
0 1 2 3 4 5 6 7 theta (rad)
2
3
4
5
psi (rad)
elbow-up elbow-down
Figure 2.
Exercise 2.26. (a) The configuration space is the space of the variables x 1 , y 1 , θ 1 , x 2 , y 2 , θ 2 where (xi, yi) denotes the center of mass of the i-th link and θi denotes the orientation of the link. The constraint equations and corresponding feasible configuration space are given by
C = {q = (x 1 , y 1 , θ 1 , x 2 , y 2 , θ 2 ) | gi(q) = 0 (i = 1, · · · , 4),
where
g 1 (x) = x 1 − cos θ 1 g 2 (x) = y 1 − sin θ 1
g 3 (x) = x 2 − (2 cos θ 1 +
cos(θ 1 + θ 2 ))
g 4 (x) = y 2 − (2 sin θ 1 +
sin(θ 1 + θ 2 )).