Download 5 Questions with Solution of Advanced Structural Analysis - Exam 1 | CIVL 4440 and more Exams Civil Engineering in PDF only on Docsity!
Name ________________________________
CIVL 4440/6440 Exam No. 1 Spring 2011
Please write legibly so that you receive the maximum credit you deserve.
Please box in all final results.
25 points 1) The structure shown below consists of three members that are connected together at joint b. The area of all the bars is the same (A) and all bars have the same modulus of elasticity (E).
a) Using the three basic principles of mechanics (equilibrium, compatibility, constitutive relations), obtain an expression for the vertical displacement at joint a. Note that matrix methods of analysis are NOT needed to solve this problem and should NOT be used (although it may be useful to use the element stiffness equations to express global bar forces in terms of global displacements).
b) Clearly indicate where in your work you have used the above three principles of mechanics.
P
L
L
By inspection, all three members are in tension. Therefore,
directions of all internal forces are known.
(^) (^) (^) Constitutive Relation ab ab ab ab a b a b
AE
F P k v v v v
L
a^ ^ bab
PL
v v
AE
^ ^ ^ ^0 Equilibrium of joint B
bc bd
Fy Fy Fy Fab
But, from symmetry:
bc bd y y
bd bd y y
F F
P
F P F
For member bd, element stiffness equation gives ( φbd = θ , L (^) bd = L /sin θ ):
2 2
sin sin Constitutive relation
sin
bd bd bd y bd b b bd
AE EA
F v v
L L
Compatibility
bd ab
vb vb vb
2
sin
2 sin
b
P EA
v
L
b^ 2 sin 3
PL
v
EA
3 3
2 sin 2 sin
a b
PL PL PL PL
v v
AE EA AE AE
3
2 sin
a
PL
v
AE
P
bd Fy
bc Fy bd Fx
bc Fx
P
P
va
ab
vb
5
5
5
2
4
1
2
1
Part (a) and (b)
By inspection, members ac , bc , and cd
are zero-force members. Therefore:
K 23 K 53 K 63 0
Part (c)
13 ^13
ab AE
K k
L
By inspection, 13
ab AE
k
L
Can also obtain from element
stiffness equation:
Origin at joint a of member ab: ab 0
2 2
1 13 cos^1 cos^1
ab x bd ab
AE AE AE
F k
L L L
13 ^
AE
K
L
Part (d)
33 ^33 ^33 33
ab bc bd
K k k k
By inspection, 33 (can also obtain from element stiffness equation)
ab AE
k
L
By inspection, 33 0 (can also obtain from element stiffness equation)
bc
k
Origin at joint b of member bd: bd , Lbd L cos
2 2 3
1 33 cos^1 cos^ cos
cos
bd x bd bd
AE AE AE
F k
L L L
3 3
33 ^ ^0 ^ cos^ ^1 cos
AE AE AE
K
L L L
^
3
33 ^1 cos
AE
K
L
Part (e)
No, it will not change since the global stiffness matrix is independent of the
support conditions.
K 83
K 73
K 63
K 53
K 23
K 13
K 43
K 33
3
4
3 3 3 2 4 1 2
20 points 3) The structure shown below is braced laterally by a roller support at joint b and by a diagonal brace. The global DOF's are defined below and the corresponding element stiffness matrices are given. In these element stiffness matrices, the first column corresponds to the forces required to impose a unit displacement at the lowest numbered DOF for the element, the second column to the required forces to impose a unit displacement at the next highest DOF, and so on (e.g., for member ab , the first column relates to DOF 3, the second to DOF 4, the third to DOF 5, and the fourth to DOF 6).
a) Superimpose the element stiffness matrices to obtain the global stiffness matrix.
b) Is the global stiffness matrix obtained in Part (a) singular or nonsingular (i.e., does it correspond to an unstable or stable structure)?
kN/mm
^
K ab
750 0 750 0 0 0 0 0 kN/mm 750 0 750 0 0 0 0 0
^ (^)
K bc
kN/mm 512 384 512 384 384 288 384 288
^
^
^
K (^) ac
kN/mm 0 0 0 0 0 666.7 0 666.
^
K cd
25 Points 4) The truss structure shown below is supported by two pin supports. Resistance to lateral load is provided by two cross-bracing members (there is no joint at the intersection of the cross- braces). The cross-sectional areas are shown on each member (mm^2 x 1000) and the modulus of elasticity for all members is 200,000 MPa.
a) The global DOF's are defined below and the associated global stiffness equation is also provided but with the force vector written in generic form. Define the force vector as it specifically relates to this problem.
b) Partition the global stiffness equation and set up the equation for computing the displacements at the free DOF's. Do NOT solve the equation.
c) The solution of the equation from Part (b) is: Δ 1 = 0.741 mm, Δ 2 = -0.298 mm, Δ 3 = 0.428 mm, Δ 4 = 0.264 mm. Having this information, use the partitioned global stiffness equation to set up the equation for computing the forces at the constrained DOF's (i.e., the reactions) and solve the equation. Summarize your results by sketching a FBD of the complete structure and verifying that horizontal and vertical equilibrium is satisfied.
d) Using the known global displacements, compute the force in bar bc and indicate whether it is in tension or compression.
e) Assume that the pinned support at joint a is replaced with a roller support (the roller constrains translation in the vertical direction). For this condition, partition the global stiffness equation and set up the equation for computing the displacements at the free DOF's. Do NOT solve the equation.
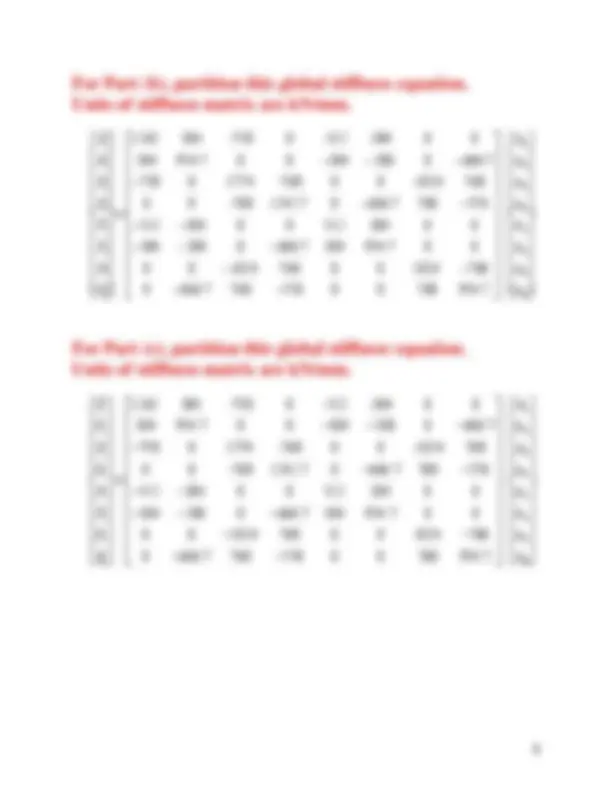
For Part (b), partition this global stiffness equation.
Units of stiffness matrix are kN/mm.
1 2 3 4 5 6 7 8 1262 384 -750 0 -512 -384 0 0
384 954.7 0 0 384 288 0 666. 750 0 1774 -768 0 0 -1024 768
0 0 -768 1242.7 0 666.7 768 576
512 384 0 0 512 384 0 0 384 288 0 666.7 384 954.7 0 0
0 0 1024 768 0 0 102
^ ^ (^)
P P P P P P P P 1 2 3 4 5 6 7 8
4 768 0 666.7 768 576 0 0 768 954.
^ ^ ^ ^ (^) (^) ^ ^ ^
For Part (e), partition this global stiffness equation.
Units of stiffness matrix are kN/mm.
1 2 3 4 5 6 7 8
^
^
P P P P P P P P
1 2 3 4 5 6 7 8
^
^
^
^
^
^
^
^ ^
Part c)
Ps^ ^ ^ K^ sf ^ ^ f ^ K^ ss ^ s ^ ^ Ksf f
kN
^ ^
^ ^ ^ ^
^ ^
^ ^
^
^ ^ ^ ^ ^
xa
ya
xd
yd
R
R
R
R
x
y
F
F
Part d)
By inspection, member bc is in tension. Since axial displacements at the end of the
member have already been determined, can obtain force using constitutive relation:
bc bc c b c b bc
EA
F k u u u u
L
0.741 0.428 234.8 kN
Fbc
Fbc 234.8 kN (T)
Alternate methods for computing the bar force are provided below.
6
2
5
Part e)
1 2 3 4 5 6 7 8 1262 384 -750 0 -512 -384 0 0
384 954.7 0 0 384 288 0 666. 750 0 1774 -768 0 0 -1024 768
0 0 -768 1242.7 0 666.7 768 576
512 384 0 0 512 384 0 0 384 288 0 666.7 384 954.7 0 0
0 0 1024 768 0 0 102
^ ^ (^)
P P P P P P P P 1 2 3 4 5 6 7 8
4 768
0 666.7 768 576 0 0 768 954.
^ ^ ^ ^ ^ ^ (^) ^ ^
1
f K ff Pf
1 1 2 3 4 5
^ ^
^ ^ ^
^
^
2
2
3 4 1 2
750 kN 0.428 0.741 234. 0 0
^
^
bc bc bc bc
F
F
F
F
Fbc 234.8 kN (T)
Another approach is to use a coordinate transformation:
1 1 2 2 3 4
1 1 cos sin 0 0
1 1 0 0 cos sin
^
F EA
F L
Can set origin at joint c ( 180 ) or at joint b ( 0 ).
For origin at joint c:
bc o^ bc o
F 2 b^ c^ F^1 x
y
y'
x'
1 1 2 2 3 4
1 1 cos sin 0 0 1 1 0 0 cos sin
^ ^ ^ ^ (^)
bc bc bc bc bc
F (^) EA F L
1 1 2 2 3 4
cos sin cos sin cos sin cos sin
^ ^ ^
^
^ ^ ^
bc bc bc bc bc bc bc bc bc
F EA
F L
1 1 2 2 3 4
^
^ ^
bc
F EA
F L
1 ^ ^1
2 1 3
200 30 0.741^ 0.428^ 234.
750 kN 8 0.741^ 0.428^ 234.
^ ^
^ ^
^
F
F
Fbc 234.8 kN (T)
For origin at joint b:
b c 1 F 2 F
x, x'
y, y'
3 1 4 2 1 2
^
^ ^
bc
F EA
F L
1 ^ ^3 2 3 1
750 kN
^ ^
^ ^
^ ^
F
F
Fbc 234.8 kN (T)
Another approach is to use the method of sections (although this approach does not
use the global displacements as instructed).
Fbc
o
M^ o ^3 Fbc ^ 500 3^ ^ ^ 235 3 ^ ^ 375 4^ ^0
Fbc 235 kN (T)
Equations which may be useful
2 2 (^1 ) 2 2 (^1 ) 2 2 (^2 ) 2 2 (^2 )
cos cos sin cos cos sin
cos sin sin cos sin sin
cos cos sin cos cos sin
cos sin sin cos sin sin
^
^
^
x
y
x
y
F u
F EA v
F L u
F v
^ ^ ^ ^ (^) ^ ^ ^ ^ ^
f ff^ fs f
s (^) sf ss s
P K^ K
P (^) K K
Pf^ ^ ^ K^ ff ^ ^ f ^ ^ Ksf s
Ps^ ^ ^ K^ sf ^ f ^ Kss s
^
' ' ' '
F k k
1
1 2
2 3
4
1 1 cos sin 0 0
1 1 0 0 cos sin
^ ^
F EA
F L